
2021年創業、日本発の自動運転スタートアップ。
人類最大級の技術課題を、日本からのアプローチで打ち破る。
Founded 2021. An autonomous-driving startup from Japan.
Breaking through humanity's grand technical challenge — with a Japanese approach.

完全自動運転を、実現する。 We make full self-driving a reality.

開発した将棋AI"Ponanza"が 初めて将棋名人へ勝利。
AI企業HEROZでは上場を経験。His shogi AI "Ponanza" was the first to defeat the human champion.
Experienced IPO at AI company HEROZ.
大きな産業で世界で戦える企業を 創り上げるために2021年にTuringを創業。Founded Turing in 2021 to build a global contender in a major industry.

AI 時代こそ、日本の再起の機会だ。 Japanese companies in the world's top 50 by market cap (as of May 2026).
The AI era is Japan's moment to rise again.
国内に眠る才能に、
世界水準のフィールドを。
World-class field
for Japan's hidden talent.
日本の自動車産業は GDP の約1割=50兆円を占める国家の基幹産業だ。80年超の歴史を誇るトヨタが世界首位を守ってきたが、米中のスタートアップが2000年代以降雨後の筍のように台頭し、王座を脅かしている。業界は"ゲームチェンジ"のただ中。だからこそ挑む価値がある。
Japan's auto industry — ¥50T, ~10% of GDP — has been the country's backbone for 80+ years. Toyota held the world's top spot for decades, but US and Chinese startups have risen in waves since the 2000s to threaten it. The industry sits in the middle of a generational game change. Which is exactly why it's worth challenging.
特に AI という新たな技術領域では、従来の工学的アプローチ──モジュール設計や性能向上の積み上げ──がそのまま通用しない。AI を経営の中心課題として捉え、技術と組織を変革できるリーダーが、日本にはまだ十分に育っていない。
In AI, conventional engineering approaches — modular decomposition, incremental performance gains — no longer apply. Leaders who can put AI at the center of management and transform both technology and organization are still scarce in Japan.
世界の先行企業は、自動運転に 数千億円〜数兆円規模 の投資を重ねている。大規模 AI 学習基盤、一流研究者の招聘、全力で集中できる開発環境──整った土壌の上で、次世代のモビリティが育まれている。
Leading global players invest hundreds of billions to trillions of yen in autonomous driving. Massive training infrastructure, world-class researchers, and the focused environments they need — that is the soil in which next-generation mobility is being raised.
だからこそ、国内に眠る才能に世界水準の問いとフィールドを提供し、完全自動運転という人類最大級の技術課題を、日本からのアプローチで打ち破る。
"We Overtake Tesla."
So we provide world-class questions and fields to the talent waiting at home, and break through humanity's grand technical challenge — full self-driving with a Japanese approach.
"We Overtake Tesla."
30分以上、東京を、
ハンドル・アクセル・ブレーキ
無介入で走る。
30+ minutes across Tokyo.
Zero touch on wheel, brake,
or accelerator.
Day1からE2Eに懸ける、という賭けに対する 最初の決定的な勝利。 The first decisive victory of our Day-1 bet on End-to-End.
ゼロショットで、
銀座を走り抜ける。
Zero-shot.
Through Ginza.
Tokyo30 を達成した E2E モデルは、半年で 地図データも、銀座向けの特化チューニングもない状態 で、銀座の街を自律的に走り抜けるまで進化した。 Six months after Tokyo30, the model now drives through Ginza without any HD map data or Ginza-specific tuning.

国内初。
運転版の "Sora"。
Japan's first.
The "Sora" for driving.
約1,500時間の走行映像で学習し、未来シーンを動画として生成する。エッジケース探索と、未来予測に基づく運転判断の 両方 に使える。 Trained on roughly 1,500 hours of driving footage, Terra generates future scenes as video — usable both for edge-case exploration and prediction-grounded decision making.
人間の "常識" を、
データセットに刻む。
Encoding
human "common sense" into data.
Turing が構築した自動運転向け大規模 VLA データセット「CoVLA-Dataset」。約10,000本の走行クリップに、カメラ映像・自然言語によるシーン記述・軌跡/制御信号の3モダリティを同期収録。WACV 2025 採択、HuggingFace で公開済み。 Turing's large-scale VLA dataset for autonomous driving — CoVLA-Dataset. ~10,000 driving clips with three synchronized modalities — camera footage, natural-language scene descriptions, and trajectories / control signals. Accepted at WACV 2025 and released on HuggingFace.

国内初。VLAモデル
公道リアルタイム制御。
Japan's first.
Real-time VLA control on public roads.
2026年3月、Turing は国内初となる Vision-Language-Action モデルによる公道リアルタイム推論自動運転制御を実現。20億パラメータ、10Hz、100ms以下のレイテンシで車両を直接制御する。 In March 2026, Turing realized Japan's first real-time, inference-driven autonomous control on public roads via a Vision-Language-Action model. 2B parameters, 10Hz, sub-100ms latency — steering the car directly.
富岳の40%、
国内トップ級の計算基盤。
40% of Fugaku.
Japan's top-tier compute.
2024年にNVIDIA H100 96基の自社GPUクラスタ「Gaggle Cluster」を構築。クラウドGPUと合わせるとスーパーコンピュータ富岳のAI演算性能の40%に相当し、2027年までに 3.5〜7 エクサフロップス(5〜10倍) へ拡張する計画。 Built our in-house GPU cluster "Gaggle Cluster" with 96× NVIDIA H100 in 2024. Combined with cloud GPUs, it reaches ~40% of supercomputer Fugaku's AI compute, scaling to 3.5–7 exaFLOPs by 2027 (5–10× growth).
創業4年。累計272億円。Tokyo30、達成。 4 years in. ¥27.2B raised. Tokyo30 — achieved.
各開発チームと連動する、開発コンポーネント。 Development Components tied to each engineering team.
車両は AI / Application / OS・Middleware / Hardware の各レイヤーで構成される。それぞれを専門の開発チームが担い、自社で開発・運用 する。 The vehicle stack spans AI / Application / OS & Middleware / Hardware. Each layer is owned by a dedicated team — built and operated in-house.
車両Vehicle
開発コンポーネントComponents
開発チームTeams
完全自動運転に向けた
大規模基盤モデル。
Large-scale foundation model
for full self-driving.
- 視覚-言語-行動(VLA)モデルの構築Building Vision-Language-Action (VLA) models
- VLAモデルの最適化VLA model optimization
- モデル評価ベンチマーク指標の構築Building model evaluation benchmarks
DriveHeron
Encoder
head
E2E モデルと、
新規アーキテクチャの探索。
E2E models and
new architecture exploration.
- End-to-End自動運転のためのMLモデル開発ML model development for E2E self-driving
- モデル・学習データ・制御の改良Model / training data / control refinement
- 車両制御、姿勢推定アルゴリズムの開発Vehicle control & pose estimation
- MLモデル評価のための実車走行試験Real-vehicle ML model evaluation testing

シミュレータと、
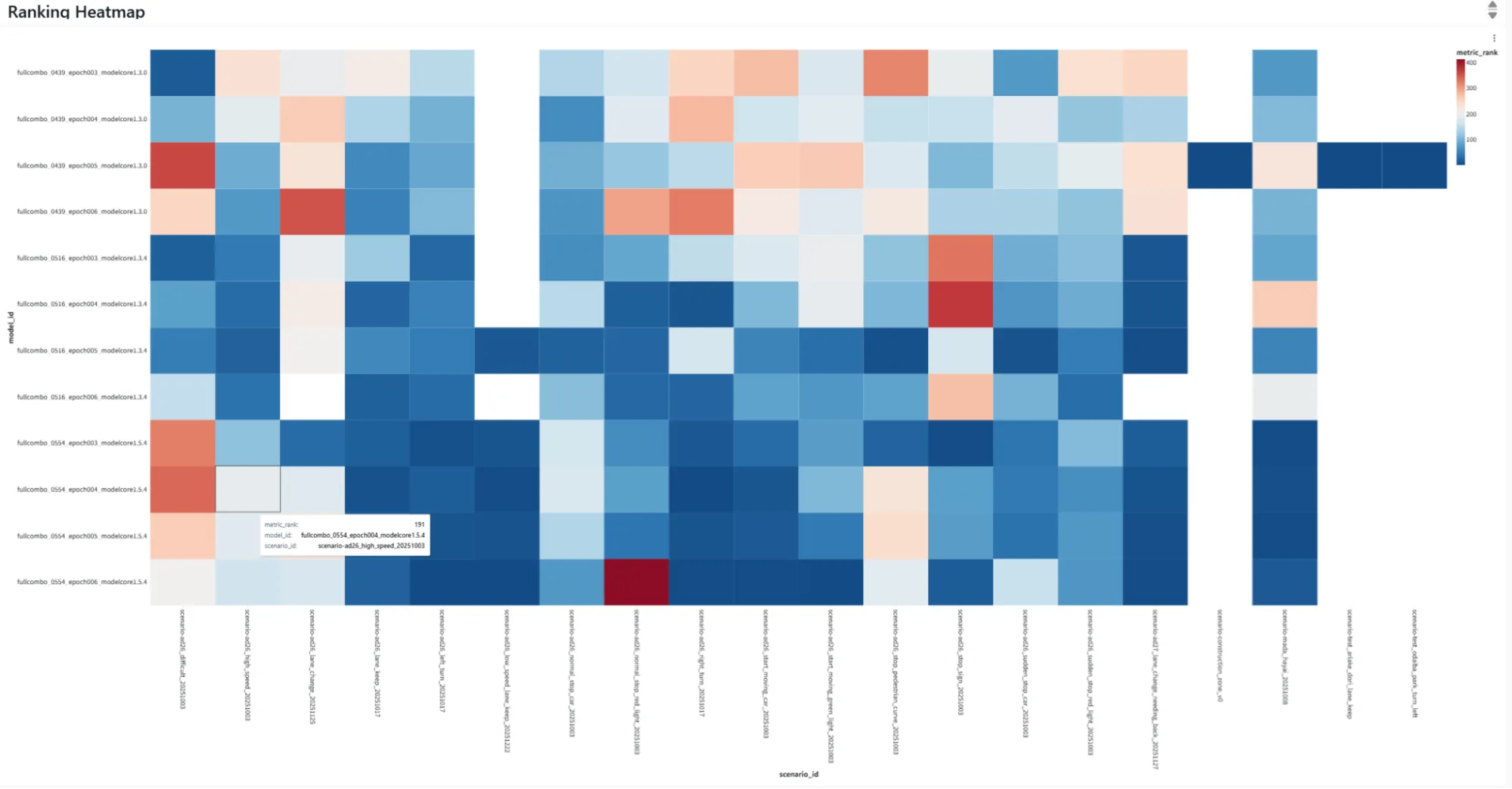
評価ダッシュボード。
Simulator and
evaluation dashboard.
- シミュレータを用いた自動運転モデル評価パイプラインの開発(AWS Step Functions, AWS EKS etc.)Sim-based eval pipeline(AWS Step Functions, EKS etc.)
- 自動運転モデル実車走行実験の評価メトリクスの開発Real-vehicle eval metrics
- E2E自動運転向けシミュレータの開発E2E simulator development
- 評価ダッシュボードの開発Evaluation dashboard

大規模 GPU 計算基盤を、
ゼロから設計する。
Designing large-scale GPU
infrastructure from scratch.
- GPUクラウドインフラの新規調達/構築/運用Cloud GPU infra procurement / build / ops
- 自動運転AI開発に最適化した計算基盤設計Compute infra optimized for AD AI
- モデル学習やデータ処理において、低精度演算などを利用して最適化と高速化実装Low-precision compute optimization
- NVIDIA H100 96基の自社GPUクラスタ「Gaggle Cluster」 構築/運用96× H100 in-house "Gaggle Cluster"
- インフラ可視性向上Infrastructure observability
カメラ → AI →
車両制御を、つなぐ。
Camera → AI →
Vehicle control, connected.
- 組み込みLinuxで実行する自動運転システム開発Embedded-Linux self-driving system
- センサ制御や通信用ミドルウェア開発Sensor control & comm middleware
- 搭載するハードウェアの選定・評価In-vehicle hardware selection & eval
- AIモデルのデプロイ(CUDA, TensorRT)AI model deployment (CUDA, TensorRT)
- データ収集システムの開発/運用Data-collection system dev/ops
- 自動運転のデモ用やデバッグ用のUI開発UI for self-driving demo & debug
- 複数SoCやBSP向けにシステム移植&検証
などSystem port & validation across SoCs / BSPs, etc.

チューリングは、絶好の位置・絶好のタイミングで
事業を展開している。
Turing is in the right place
at the right time to grow its business.
完成車メーカーや部品サプライヤーと共同研究を推進。 Driving joint R&D with OEMs and Tier-1 suppliers.
将来の E2E モデル量産を見据え、まずは 自動車メーカーや部品サプライヤーとの共同研究や技術提供契約 を模索。 Toward future E2E model mass production, we first pursue joint R&D and technology licensing with OEMs and Tier-1 suppliers.
フェーズ 1Pre-prod
Phase 1
フェーズ 2Pre-prod
Phase 2
自動運転はスマホ革命以来の大変革。 Autonomous driving — the biggest shift since the smartphone.
完全自動運転が新たな経済圏・巨大サービスプラットフォームを生み出す。 Full self-driving will create new economic zones and platforms.
- iPhone登場以降、通信・コンテンツ産業が激変Telecom and content industries transformed since iPhone
- GAFAMの台頭、SNS普及、アプリ経済圏の爆発的成長Rise of GAFAM, SNS, and the app economy
- 多くの産業を巻き込み"生活様式"そのものを変えたReshaped lifestyle itself across industries
- OTAアップデートで車を常に進化させる「スマホのような車」Cars that evolve via OTA — like smartphones
- 渋滞ゼロ、事故ゼロ、移動自由、物流効率化Zero traffic, zero accidents, free mobility, logistics efficiency
- 車周辺の巨大サービスプラットフォームと新サービスの誕生Birth of massive car-centric service platforms
チューリングの完全自動運転AIを
デファクトスタンダードに。
Make Turing's full self-driving AI the de facto standard.
あらゆるメーカーがスマホ的な車を望むとき、チューリングのAIを標準的な選択肢に。完全自動運転AIはスマホ以上に人類の生活様式を大きく変える技術であり、近い将来に実現すると確信しています。完全自動運転AIが実現した未来に、チューリングが標準的な選択肢になっているよう、今この瞬間を全速力で走っています。 When every maker wants smartphone-like cars, Turing's AI should be the default choice. Full self-driving AI will reshape human lifestyle more than the smartphone, and it's coming soon. We are sprinting today — so that when that future arrives, Turing is the standard choice.

なぜチューリングが自動運転で勝てるのか? Why Turing can win in autonomous driving?
AI開発におけるリーダーシップ Leadership in AI development
AIエンジニアを惹きつけるには魅力的な目標とそれに対する正しいアプローチ、そしてリーダーシップが必要。 Attracting AI engineers requires a compelling goal, the right approach, and leadership.
チューリングはAI開発で実績を持つ山本CEOのリーダーシップの下、完全自動運転という人類のグランドチャレンジに挑む。 Under CEO Yamamoto's proven AI track record, Turing takes on humanity's grand challenge — full self-driving.
日本の強い自動車産業 Japan's strong automotive industry
完全自動運転はAIソフトウェアを開発するだけでは実現できない。 Full self-driving cannot be realized through AI software alone.
ハードウェアとの融合が必要不可欠であり、高い技術力と強固なサプライチェーンを持つ日本だからこそ完全自動運転の開発にチャレンジできる。 Hardware integration is essential — and Japan, with its deep engineering and robust supply chain, is uniquely positioned to take on this challenge.
自動運転はNot a Winner Takes ALL. Autonomous driving is Not a Winner Takes ALL.
このバリューは、私たちチューリングそのもの These values are Turing

エンジニアとしてのスキルアップを実現する環境 Engineering Growth Environment
世界クラスの大きな目標World-Class Mission
「End-to-End」自動運転システムを開発している会社は日本でチューリングのみ(米はTesla、英はWayve)The only company in Japan developing an "End-to-End" autonomous-driving system (US: Tesla, UK: Wayve).
「完全自動運転」という人類のグランドチャレンジを実現するためには、一人ひとりに大胆なチャレンジが求められます。その分、得られる経験は人生でかけがえのない思い出になると信じています。
また、自動運転 × 生成AIの開発は全世界で急激に注目され始めた領域です。この領域に今飛び込むことで得られる知見や経験は今後の人生を豊かにしてくれるでしょう。To realize "full self-driving" — humanity's grand challenge — each member faces bold challenges, and the experience becomes priceless. Autonomous driving × Generative AI is a rapidly growing field; diving in now yields career-defining insights.

トップエンジニアと
大規模な計算資源Top Engineers &
Large-scale Compute
- AI/ソフトウェアに強い経営チームLeadership strong in AI/Software
- 日本や世界を代表するIT/Web企業出身者Alumni of leading IT/Web companies
- 日本を代表するメーカー出身者Alumni of leading manufacturers
など各企業のトップエンジニアが集まる多様性のあるエンジニア組織です。
また、経済産業省のGENIACに採択されたり、自社GPUクラスタ(H100 96基)を構築したりと、大規模な計算資源を確保し活用する体制を作っています。1人当たりのエンジニアが活用できる計算資源量は国内トップクラスです。A diverse engineering org where top engineers gather. Selected for METI's GENIAC, in-house GPU cluster (H100×96) built — per-engineer compute is top-class in Japan.

海外出張・
カンファレンス登壇Overseas Travel &
Conference Speaking
最新の自動運転システムの視察やCVPR等のトップカンファレンスへ参加するための海外出張が可能です。新卒社員の多くも海外出張を経験しており、国内に留まらず世界を意識した開発や研究に注力できます。Overseas trips for inspecting AD systems and attending top conferences like CVPR. Many new graduates have experienced overseas travel — develop and research with a global perspective.
国内のカンファレンスやAWS Summit等にも積極的に参加しており、登壇する機会に恵まれる環境です。Active participation in domestic conferences and AWS Summit — speaking opportunities abound.

扉一枚で、
ラボに行ける。
Walk through one door.
You're in the lab.
東京流通センター内に本社移転。車両開発エリアとオフィスエリアが一拠点に集約され、研究と量産開発のサイクルが 最速で回る。 HQ moved into the Tokyo Logistics Center. Real cars, data fleet, and GPU cluster — all in one place, for the fastest possible research-to-production cycle.
会社概要 Company Profile
東京流通センター物流ビルA棟AE2-1-2A-Building AE2-1-2, Tokyo Ryutsu Center, 6-1-1 Heiwajima, Ota-ku, Tokyo
(役員・正社員75名、インターン・有期雇用17名)92
(75 officers/full-time + 17 interns/contract)


組織構成 Organization Structure
第1グループAutonomous
Group 1
第2グループAutonomous
Group 2
第3グループAutonomous
Group 3

組織構成 Organization Composition
組織構成Composition
人員構成 Member Composition
年齢層Age
パパ・ママ比率Parents Ratio
中途・新卒Hire Type
働く環境・福利厚生 Work Environment & Benefits
ハイブリッドワークHybrid Work
オフィスと自宅のどちらでも勤務が可能です。クイックにコミュニケーションできるためちょっとした疑問をすぐに解消できます。家庭の都合に合わせて働ける環境が整っています。Work from office or home. Quick communication enables on-the-spot question resolution. An environment that adapts to family circumstances.
フレックスタイム制度Flex Time
コアタイムが11:00~15:00のフレックスタイム制度です。チームメンバーとのコミュニケーションをコアタイム内で行うことによって、それ以外の時間は自身の裁量で柔軟に働いています。Core hours: 11:00–15:00. Team communication happens within core hours; other hours are flexible at your discretion.
産育休・介護休業制度Parental & Care Leave
産休・育休・介護休業制度があり、取得実績も多いです。入社1年未満の方でも、最長2ヶ月までを上限として特例での取得実績があります。採用面接時点で取得予定が決まっている方は柔軟に対応しますので、採用プロセスの中でお申し出ください。Maternity / paternity / family-care leave with many active users. Special allowance up to 2 months even for those under 1 year of service. If you plan to take leave, please let us know during the hiring process.
PC等開発環境構築支援Dev Environment
入社時のPCを選択できる制度を用意しています。オフィスのデスクトップは全てウルトラワイドディスプレイを用意し、今後も開発に専念できる環境支援を行います。Choose your PC at onboarding. Every office desktop has an ultra-wide display, with continuous investment in dev environment.
駐車場代補助制度Parking Subsidy
開発部所属のエンジニアかつ30歳未満の方を対象とした駐車場代補助手当です。(上限5万円/月)
若手開発者が日常的に運転できる環境作りを支援することで、自動運転技術開発の更なる向上を目指す制度です。Parking subsidy (up to ¥50K/month) for engineers under 30 in the Engineering Dept., supporting daily driving to advance autonomous-driving R&D.
エンジニア開発ツール支援Dev Tool Support
ChatGPT, Claude, Cursor, GitHub Copilotなどの開発支援ツールの費用を会社が負担する制度があります。これらの制度はエンジニア・リサーチャーの開発・研究を加速することを目的としています。The company covers ChatGPT, Claude, Cursor, GitHub Copilot and other dev-assist tool fees — to accelerate engineer/researcher work.
メンバーのバックグラウンド Member Background
AI
Talent
Software /
Hardware Engineer
Business /
Corporate
10名の 経営チーム。異なる強みが、ひとつのゴールへ。 A leadership team of 10. Different strengths, one mission.











これまでの投資家、日本の総力。 Our investors — backed by Japan.
これまでの投資家Equity Investors

募集職種 Open Positions
- MLエンジニアML Engineer
- MLOpsエンジニアMLOps Engineer
- ソフトウェアエンジニア(学習・推論最適化)Software Engineer (Training & Inference Optimization)
- ソフトウェアエンジニア(OS・組み込み、ミドルウェア、ファームウェア、ロボティクス)Software Engineer (OS · Embedded · Middleware · Firmware · Robotics)
- GPUクラスタ / HPCクラスタエンジニアGPU / HPC Cluster Engineer
- 自動運転AI開発ドライバーAutonomous Driving AI Test Driver
- 新卒エンジニア / インターンNew Graduate Engineer / Intern
- 採用マネージャーTalent Acquisition Manager
- 採用担当Recruiter
- ファイナンスマネージャーFinance Manager
- 経理マネージャーAccounting Manager
- 経理担当Accounting Specialist
- 法務Legal

Recruiting Process

- 1. カジュアルに話すCasual Chat
- 2. 書類選考Document Screening
-
3. 面接(1〜2回)+技術試験Interview (1-2) + Tech Test
※技術試験は配属チームに応じて
実施するかどうか決めます*Tech test depends on the team - 4. 体験入社(半日〜1日)Trial Period (half-1 day) ※インターンの場合は最長2日間*Up to 2 days for interns
- 5. 最終面談Final Interview
- 6. 内定・オファー面談Offer Meeting
柔軟な選考フローFlexible Process
左に記載している選考フローはあくまでも基本的な形式です。
みなさんのご状況に応じて、面談・オフィス見学・Open Officeなどの調整が可能です。
もちろん他社選考状況に応じて当社の選考プロセスを早めたい等というご相談も可能です。
※選考期間の目安は、およそ2〜3週間です。The flow on the left is the basic format. We adjust to your situation including office visits, Open Office, etc. Acceleration based on other offers is possible. Typical duration: 2-3 weeks.
STAR面接(行動面接)STAR Interview
チューリングでは、過去の行動を掘り下げる面接手法として「STAR」を活用しています。
どのような状況(Situation)で、どのような課題(Task)に対して、
どのような行動(Action)を起こし、どのような結果(Result)を出したのか。
これらに関する質問をすることで、皆さんの経験やスキルを正しく理解したいと考えています。We use STAR (Situation-Task-Action-Result) to understand candidates' past behavior in depth.
体験入社Trial Period
体験入社では、SlackやNotionなどゲスト権限として社内情報にアクセスできるようにし、
配属予定チームの社員と半日 or 1日間一緒に働いていただくプロセスです。
チューリングのカルチャーを体感いただき、お互いにミスマッチがないかを確認するための場になります。Work with the future team for half/full day with guest access to Slack/Notion. Experience the culture firsthand to check mutual fit.
チューリングが書類選考時に
注目しているポイントWhat Turing Looks for
in Your CV
-
職歴概要Career Summary
- これまでの経歴や実務経験、得意領域・興味領域について200~300文字程度のまとめ - A 200-300 character summary of your career, expertise, and interests
-
スキルSkills
- これまで使ってきた開発言語や携わってきた開発領域、およびその習熟度について
- これまで経験してきた開発環境や役割、責任範囲について - Languages, domains, and proficiency
- Environments, roles, and scope of responsibility -
職歴概要Career Details
- 所属企業毎の職務内容:特にどういった開発環境・チーム体制で、どんな役割を担い何を開発したのか
- 開発成果物が分かる資料やURL(サービスサイトやGitHub、テックブログなど) - Per-company details: environment, team structure, role, what you built
- Output references (sites, GitHub, tech blog, etc.)
体験入社についてAbout the Trial Period
-
実施目的・概要Purpose & Overview
体験入社は双方のミスマッチを防ぐことを目的としています。完全自動運転という壮大なミッションに挑むには、応募者様やそのご家族の皆様が納得する形で入社意思を決めていただくことが非常に重要だと考えています。そのため、事前にNDAを締結した上で、SlackやNotionなど体験入社へお越しいただいた方のみに公開できる範囲の社内情報をご覧いただくように設計しています。The trial period prevents mismatches. Given the magnitude of full self-driving, we believe applicants and their families should make informed decisions. Under NDA, we share internal information via Slack and Notion.
また、当日は配属想定チームが事前に用意した課題に取り組んでいただき、取り組み内容を発表いただくことを予定しています。(課題については当日午前中に共有します)You will work on a pre-prepared task and present the result. (Task shared on the morning of the day)
その他、チューリングの実際の開発環境や組織文化などを肌身で感じ取ってもらうことで、転職先として適しているかを確認する機会としても捉えていただくことを期待しています。We hope you use this as an opportunity to assess Turing's environment and culture firsthand.
ストックオプション Stock Options
ストックオプションとは、従業員に対して企業の株式を一定の価格で購入する権利を付与する制度です。Stock options grant employees the right to purchase company stock at a fixed price.
この仕組みの一例として、日本を代表するスタートアップの一つ、メルカリがあり、30名以上の従業員が6億円以上の資産を獲得したと言われています。チューリングの創業も、代表の山本が前職であるHEROZの上場・ストックオプション活用によって得られた資産が原資となっています。For example, at Mercari—one of Japan's leading startups—over 30 employees reportedly gained more than ¥600M each. Turing itself was founded with capital that CEO Yamamoto obtained through HEROZ's IPO and stock options.
シリーズAでの大型調達も完了し、ストックオプションの配布はこれから行います。チューリングでは可能な限りたくさんのメンバーにストックオプションを配り、次世代産業の育成や新たなエコノミクス創出に挑戦していきます。われわれが定める条件は下記で検討しています。With Series A complete, distribution is upcoming. We will distribute SO to as many members as possible, cultivating next-generation industry and new economics. Our conditions are as follows.
- チューリングが上場することTuring must go public
- SO付与時に正社員であることMust be a full-time employee at grant
- 付与するSOは原則税制適格SOSO granted are generally tax-qualified
- SO付与から5年間経過で100%の権利行使が可能(毎年20%分の権利確定)100% vesting after 5 years (20% per year)
- 退職時にそれまでに権利確定したSOは持ち出し可能Vested SO portable upon resignation

完全自動運転は、人類のグランドチャレンジ。
2030年、当たり前に世の中を走る自動運転車には、
あなたの仕事が乗っているかもしれない。
Full self-driving is humanity's grand challenge.
By 2030, when self-driving cars are part of everyday life,
your work might be inside one of them.